 |
 |
 |
 |
|
|
|
|
| Missions
|
||
        |
ExoMars ESA's ExoMars mission has gone through several phases of planning with various proposals for landers, orbiters, launch vehicles, and international cooperation planning. The programme includes several spacecraft elements to be sent to Mars on two launches. The ExoMars programme as comprises two missions: the first – the Trace Gas Orbiter – launched in 14 March 2016 while the second mission was put on hold in 2022. The first mission of the ExoMars programme consists of a Trace Gas Orbiter plus an Entry, Descent and Landing Demonstrator Module (EDM). It was launched in 14 March 2016 on a Russian Proton rocket. Three days before reached the atmosphere of Mars, the EDM was ejected from the Orbiter towards the Mars, but unfortunately the landing was unsuccessful. The ExoMars Orbiter was inserted into an elliptical orbit around Mars and then sweep through the atmosphere to finally settle into a circular, ~ 400-km altitude orbit in 2018 ready to conduct its scientific mission. The Orbiter spacecraft is designed by ESA, while Roscosmos provides the launch vehicle. The scientific payload consists four instruments from Russia and Europe to achieve its scientific goal: ACS– Atmospheric
Chemistry Suite
The Colour and Stereo Surface Imaging System will be located on the
Mars-surface-facing side of the
orbiter. The researchers of Planetary
Imaging Group
from Bern
University (UBE) has developed the
hardware of the Imaging System.
Engineers of SGF Co. Ltd. designed the onboard software of CaSSIS.CaSSIS – Colour and Stereo Surface Imaging System FREND – Fine Resolution Epithermal Neutron Detector NOMAD – Nadir and Occultation for MArs Discovery In order to constantly monitor the surface of Mars, the orbiter's scientific unit is primarily oriented perpendicular to the surface of Martin. The orbiter will rotate about an axis that will maintain its solar panels oriented towards the Sun while avoiding solar illumination of its thermal radiators. CaSSIS can compensate for the spacecraft's yaw rotation using a drive mechanism, but during nominal stereoscopic imaging the orbiter will pause its yaw-rotation to maximise the paired-image accuracy. The rotation mechanism will be able to turn the entire telescope system by 180° while its support structure remains fixed. This rotation system will also enable the camera to acquire stereo images with only one telescope and focal plane assembly. A stereo image pair will be acquired by first rotating the telescope to point 10° ahead of the spacecraft track to acquire the first image, then rotating it 180° to point 10° behind for the second stereo image. Optimal correlation of the stereo signals will be ensured as there will be identical illumination conditions every time a stereo image pair is acquired. A few interesting surface images are on the website of UBE's Planetary Imaging Group and CaSSIS Twitter. 07
October 2024
|
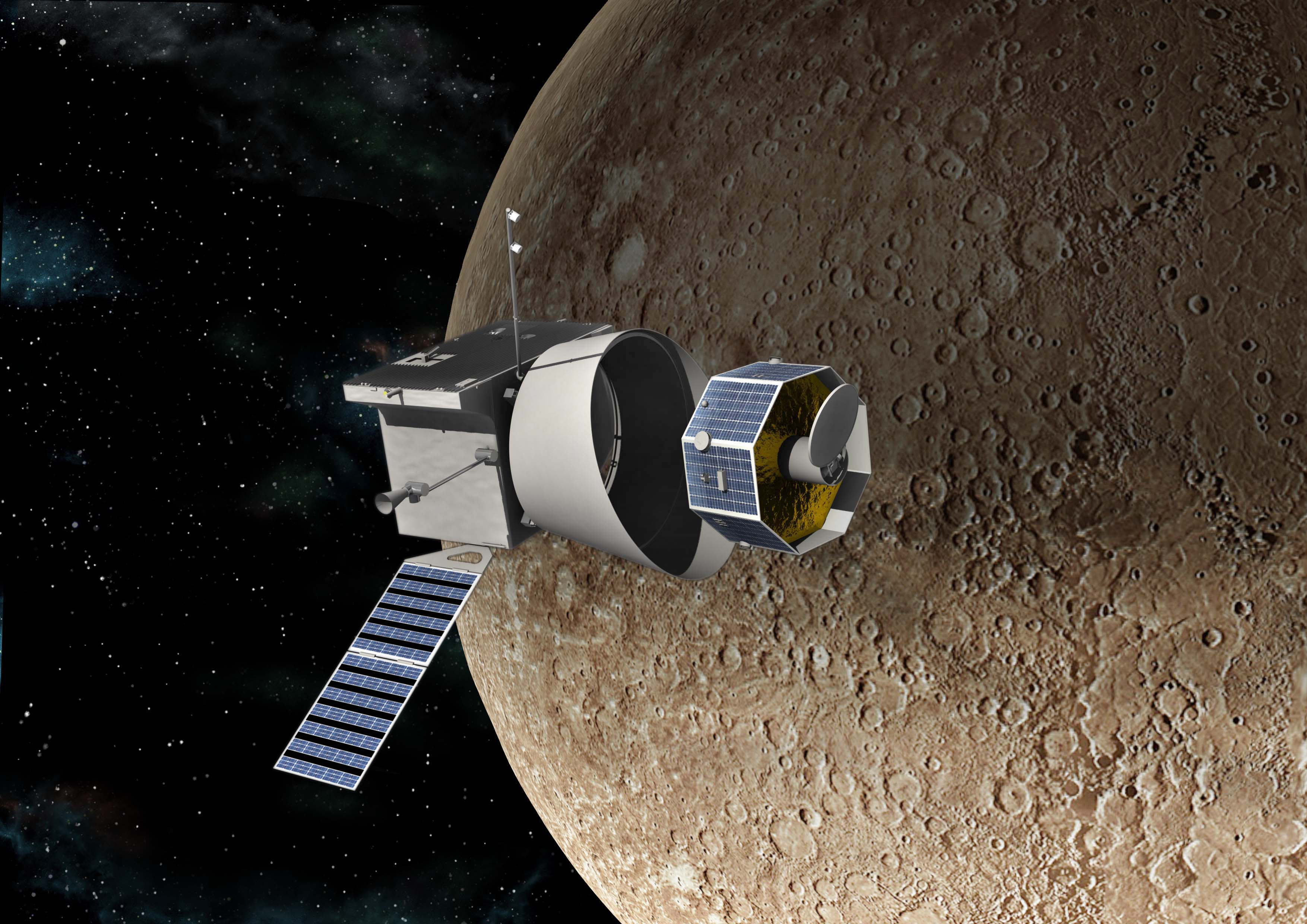
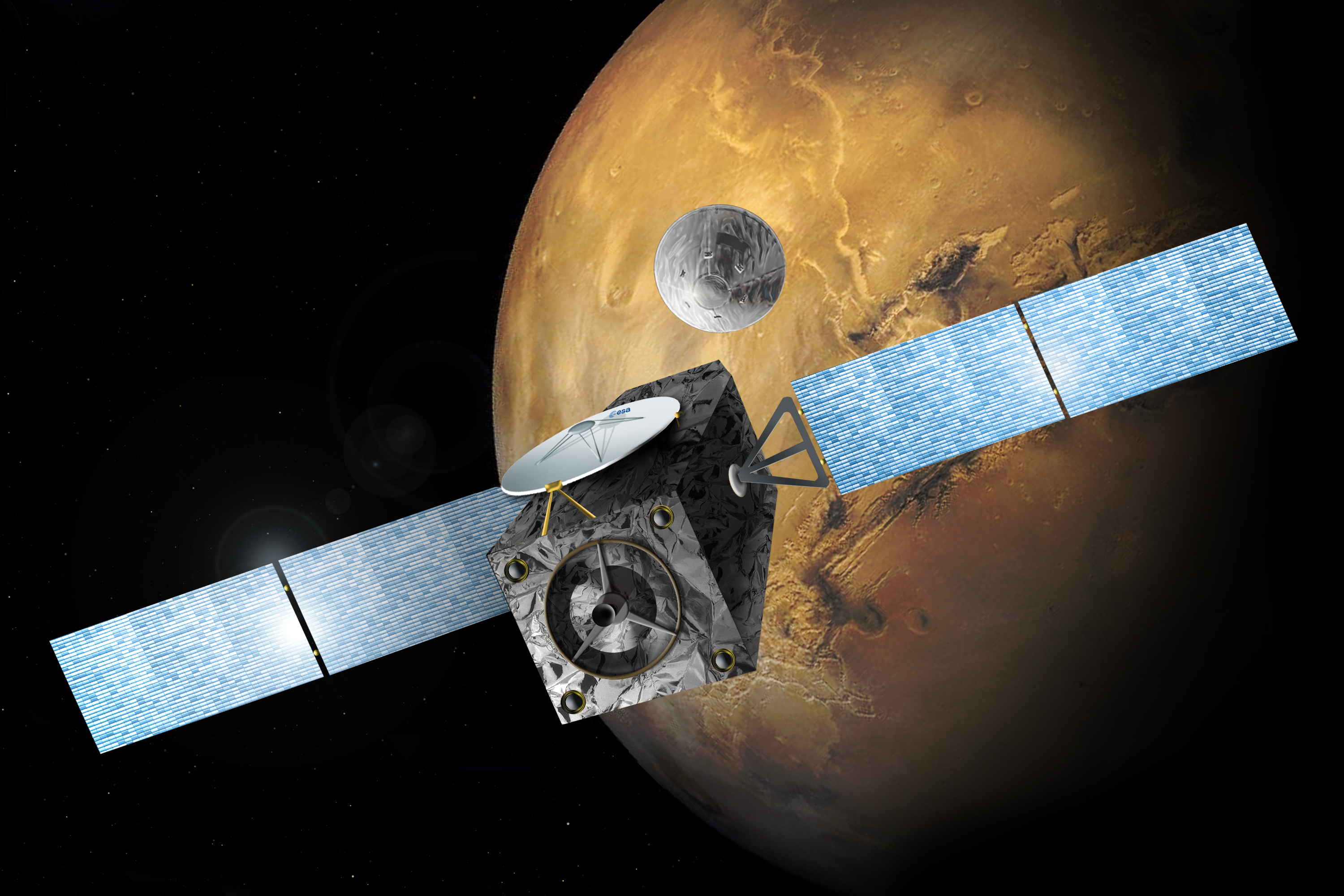 Artist impression of ExoMars separation (Credit ESA) 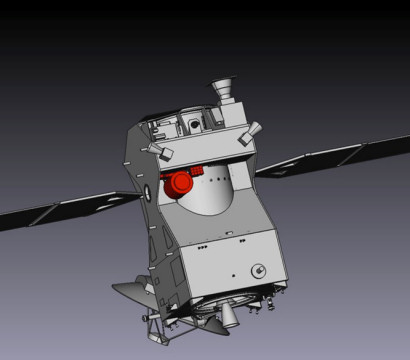 Position of CaSSIS camera on ExoMars (Credit ESA & UNIBE) 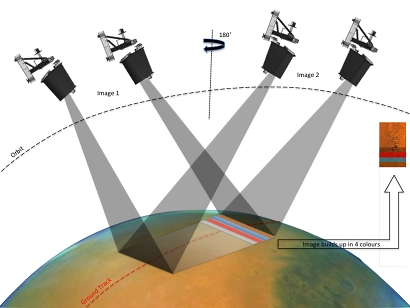 Principle of stereo image generation with CaSSIS (Credit UNIBE) |
{kind=link}